Задачи для самостоятельного решения
Задача 1
Установить класс кинематической пары, образуемой плоской (1) и конической (2) поверхностями (конус касается плоскости только вершиной). По отношению к координатным осям xyzперечислить все виды допускаемых движений конуса относительно плоскости.
Задача2
Для плоской кинематической пары, представленной на рисунке, установить:
– высшая пара, или низшая;
– класс кинематической пары;
– число подвижностей в относительном движении звеньев 1 и 2.
Задача3
Конус 2 касается плоскости 1 своей образующей. Для кинематической пары, образуемой указанными звеньями, установить класс и число подвижностей в относительном движении звеньев 1 и 2 (назвать эти подвижности по отношению к какой-либо системе координат, связанной с плоскостью).
Задача 4
Конус 2 касается плоскости 1 кромкой своего основания, вершина конуса s удалена от плоскости на расстояние где – проекция вершины конуса на плоскость. Для кинематической пары, образуемой указанными звеньями, установить класс и число подвижностей в относительном движении звеньев 1 и 2 (назвать эти подвижности по отношению к какой-либо системе координат, связанной сплоскостью).
Задача 5
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 9.
Задача6 (см. рисунок к задаче 5)
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 4.
Задача7 (см. рисунок к задаче 5)
Для механизма с одной степенью свободы написать формулу строения механизма при начальном звене 5.
Задача8
Для механизма с одной степенью свободы пронумеровать звенья и написать формулу строения механизма при начальном звене OA.
Задача 9
Считая звено 1 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 10 (см. рисунок к задаче 9)
Считая звено 2 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 11
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 9.
Задача 12 (см. рисунок к задаче 11)
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 5.
Задача 13 (см. рисунок к задаче 11)
Считая звено 9 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 14
Считая звено 1 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 15
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 4.
Задача 16 (см. рисунок к задаче 15)
Для механизма с одной степенью свободы указать номера звеньев, образующих группу III класса 3-го порядка при начальном звене 6.
Задача 17 (см. рисунок к задаче 15)
Считая звено 1 начальным, указать структурную группу, которую можно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 18
Считая звено 1 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 19 (см. рисунок к задаче 18)
Считая звено 5 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 20 (см. рисунок к задаче 18)
Считая звено 3 начальным, указать две первые структурные группы, которые можно поочередно отсоединить от механизма, не нарушая его подвижности (ответ обосновать).
Задача 21 (см. рисунок к задаче 18)
Считая звено 5 начальным, указать номера звеньев, образующих группу III класса 3-го порядка.
Задачи 22 – 24
Для механизма с высшей кинематической парой построить заменяющий механизм; замену высшей пары произвести непосредственно на кинематической схеме. Написать формулу строения заменяющего механизма при начальном звене 4.
Задачи 25 – 30
Если изображенная кинематическая цепь является структурной группой, указать ее класс и порядок (в противном случае объяснить, почему цепь не является группой).
Направляющая 1 в состав кинематической цепи не входит
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Прикладная механика Детали машин Строительная механика
00:00:00
4.3 Расчёт параметров зубчатых колёс
Рассчитываем
смещение колёс
Так как , то
Так как , то
Коэффициент
суммы смещений
(4.15)
где, – смещение 1-го колеса
– смещение 2-го колеса
Определим
угол зацепления по формуле
(4.16)
где, , –
эвольвентная функция углов и
Межосевое
расстояние определим по формуле
(4.17)
где, – модуль зубчатой передачи
Определим
делительные диаметры
(4.18)
Делительное
межосевое расстояние
(4.19)
Коэффициент
воспринимаемости смещения
(4.20)
где, – межосевое расстояние,
– делительное межосевое расстояние,
Коэффициент
уравнительного смещения
(4.21)
Определим
радиусы начальных окружностей
(4.22)
Радиусы
вершин зубьев
(4.23)
где, – коэффициент высоты головки зуба
Радиусы
впадин зубьев
(4.24)
где, – коэффициент радиального зазора


Высота зуба
(4.25)
Толщины
зубьев по делительной окружности
(4.26)


Радиусы
основных окружностей
(4.27)
Углы профиля
в точке на окружности вершин
(4.28)
Толщины
зубьев по окружности вершин
 (4.29)
(4.29)


Проверим
зубья на заострение
(4.30)
Зубья удовлетворяют условию заострения
Угловой шаг
зубьев
(4.31)
Правила работы с грузоподъемными машинами и механизмами
К работе по подъему грузов допускаются агрегаты, у которых есть зарегистрированный допуск к эксплуатации. Документ оформляется на основании комплекса проведенных испытаний. Оператор должен иметь соответствующую техническую подготовку, пройти инструктаж


Особое внимание уделяется грамотной фиксации подвешенной конструкции, подъёмного навесного механизма
При отсутствии постоянного крепления контроль положения во время перемещения выполняется напрямую стропальщиком, оператором, грузчиком. Для слаженной работы каждого из специалистов в условиях действующей стройки или производства часто используются заранее оговоренные сигнальные жесты.
В отдельных случаях возникает необходимость в дополнительной защите подвешенного товара от возможных повреждений, механических воздействий (особенно часто такие ситуации происходят при работе с веществами, которые представляют повышенную химическую, врыво-, пожароопасность). При автоматизации техники алгоритм движения зависит от параметров и свойств материала, особенностей технологического процесса.
Техника безопасности
Стандартные требования безопасности в работе с грузоподъёмными механизмами вне зависимости от их конструктивных особенностей и сферы использования – допуск лиц старше 18 лет в спецодежде, средствах индивидуальной защиты после прохождения обучения, инструктажа, сдачи экзаменов на наличие необходимых для выполнения поставленных задач навыков. Также необходимо выполнить следующие действия:
- проверить исправность узлов агрегата, приспособлений для захвата;
- убедиться в том, что уровень освещения достаточен для работы;
- использовать для обвязки стропы, которые соответствуют по своим параметрам весу перемещаемых конструкций;
- транспортировку мелких товаров выполнять в контейнере;
- не оставлять подвешенными конструкции на время перерыва;
- не допускать поднятия конструкций, которые примёрзли к земле, забетонированы, засыпаны землёй;
- выдерживать при подъёме минимум 0,5 м до самой высокой точки стационарных конструкций по траектории движения;
- не допускать перемещения над людьми.
https://youtube.com/watch?v=ajxYWhGmuHA
После окончания выполнения запланированных работ крюк поднимают, выключают рубильник. Грузозахваты убирают в место, предназначенное для хранения. При выявлении любых неисправностей, о них сообщают сменщику или мастеру цеха.
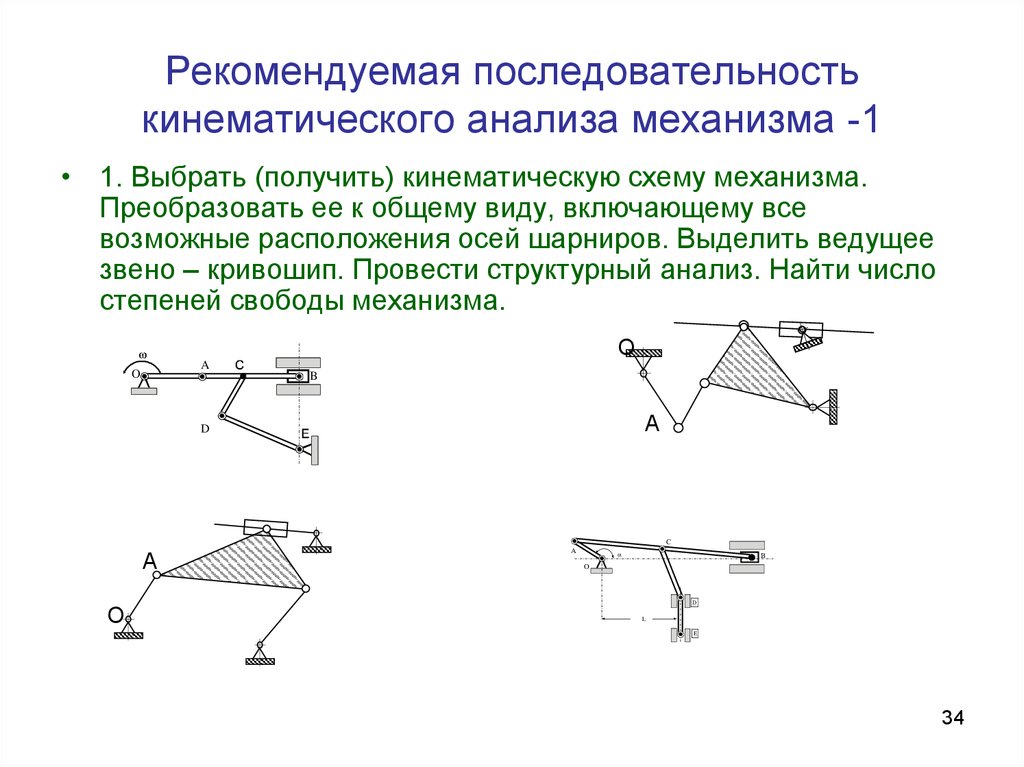
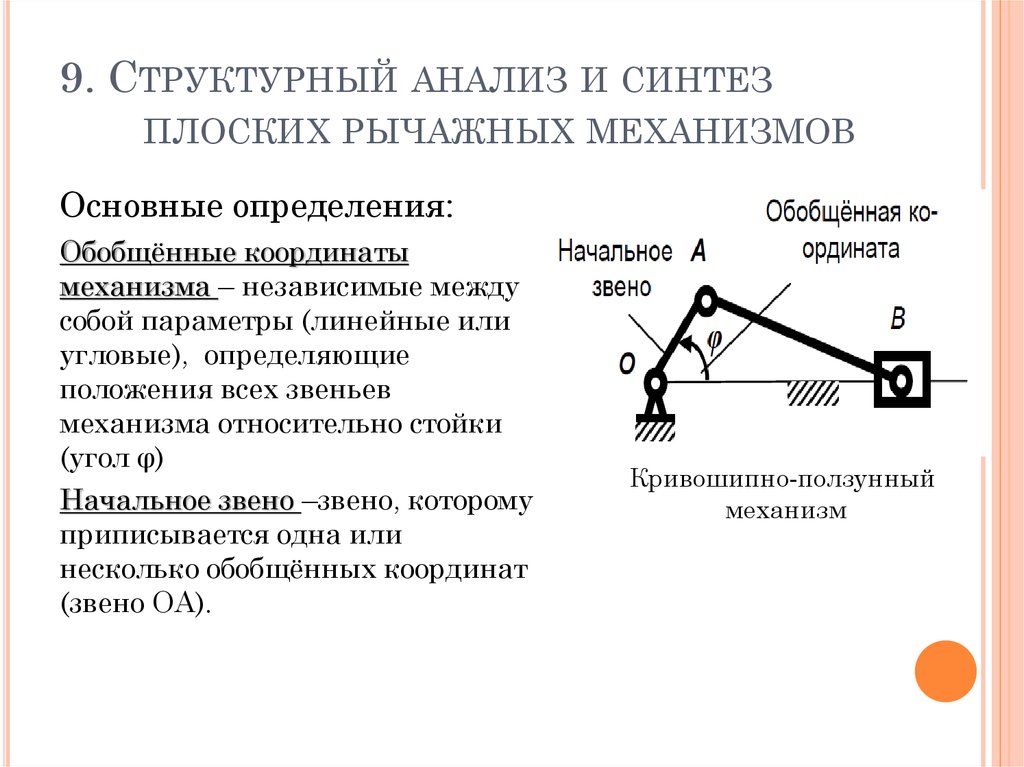
Структурный анализ механизма
Целью
структурного анализа механизма является определение количества звеньев и
кинематических пар, классификация последних, определение подвижности пар и
степени подвижности механизма, а также выделение в нем структурных групп –
кинематических цепей, у которых число входов совпадает с числом степеней
подвижности.
1) Звенья
механизма: 1 – кривошип; 2 – звено AKD; AK-кулиса; 3 – камень кулисы; 4 – шатун DE;
5 – ползун E.
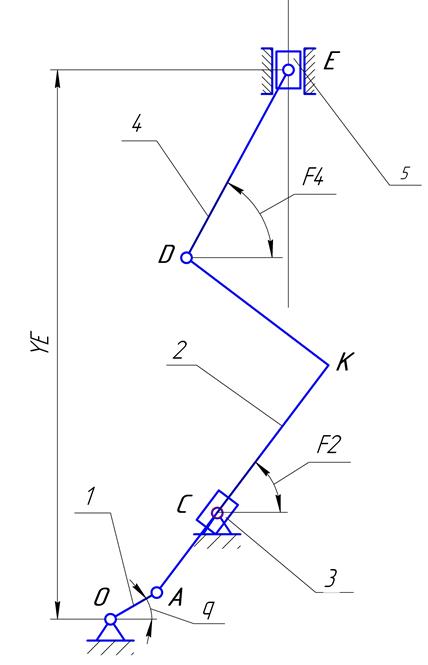
Рис.1.1. Схема механизма
2) n = 1 (один вход О–А).
3) Граф
механизма:
Рис.1.2. Граф
механизма
4) Число
подвижных звеньев механизма N = 5; количество
кинематических пар совпадает с числом подвижностей пар P
= S = 7.
5) K = P – N = 2, т.е. два независимых контура.
6) Число
степеней подвижности по формуле Чебышева W = 3N – 2pн – pв = 3.5 – 2.7 = 1
7)
W =
n, то есть рассматривается нормальный механизм.
8) В
плоскости движения нет избыточных связей и лишних подвижностей.
9) Разделение
графа механизма на подграфы, соответствующие структурным группам.
Рис.1.3. Структурный
граф механизма
10) Структурный
граф механизма

Рис.1.4. Структурный
граф механизма
Механизм образован следующим
образом: к стойке присоединяется однозвенная одноподвижная группа (звено 1) и
две двухзвенные группы Ассура – ВПВ (звенья 2 и 3) и ВВП (звенья 4 и 5).
Перечень неисправностей КШМ
Главные неприятности, которые могут случится с кривошипно-шатунным механизмом:
- Как шатунные, так и коренные шейки коленчатого вала подвержены износу и механическим повреждениям.
- Износ, механические повреждения и даже расплавление могут угрожать и вкладышам (подшипникам) шеек коленвала.
- «Болезни» поршневых колец – это закоксовывание не до конца сгоревшими продуктами горения (углеводороды окисляются только до углерода), их залегание и даже поломки, что может привести к фатальным последствиям.
- Цилиндропоршневая группа также подвержена износу. В современных «движках» это не так заметно, всё-таки они созданы по последнему слову техники, но у каждой детали имеется конечный ресурс.
- На днище поршня может отложиться нагар.
- В деталях могут появиться трещины, они могут прогореть, обломиться и даже расплавиться.
- Двигатель может даже заклинить.
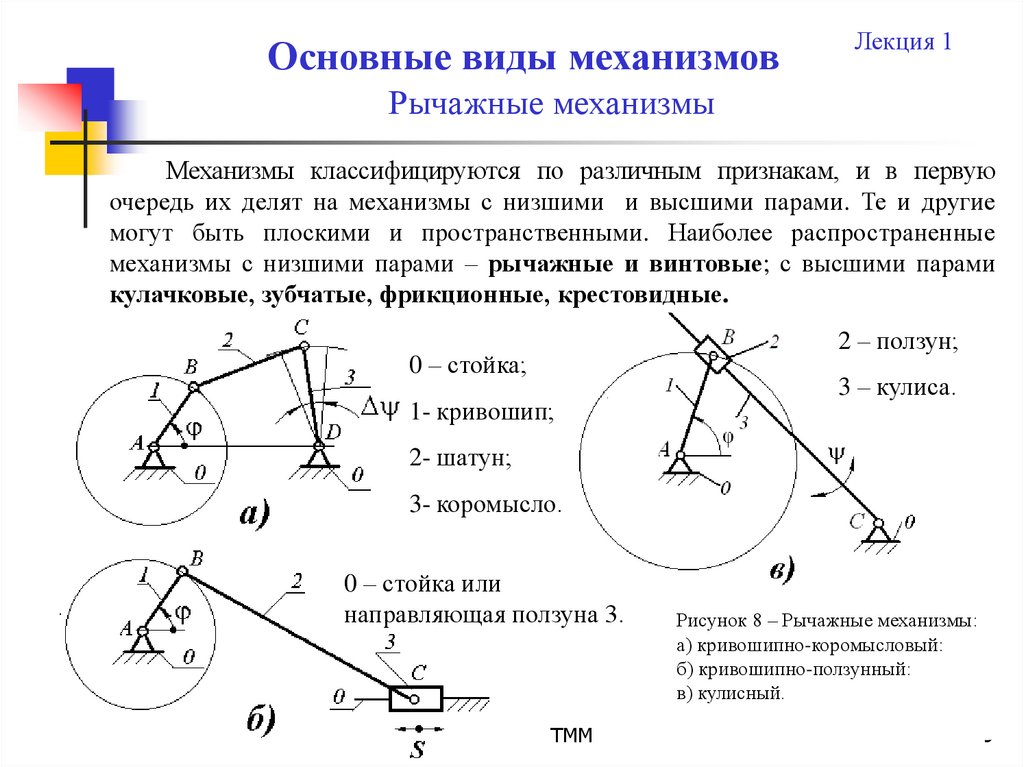
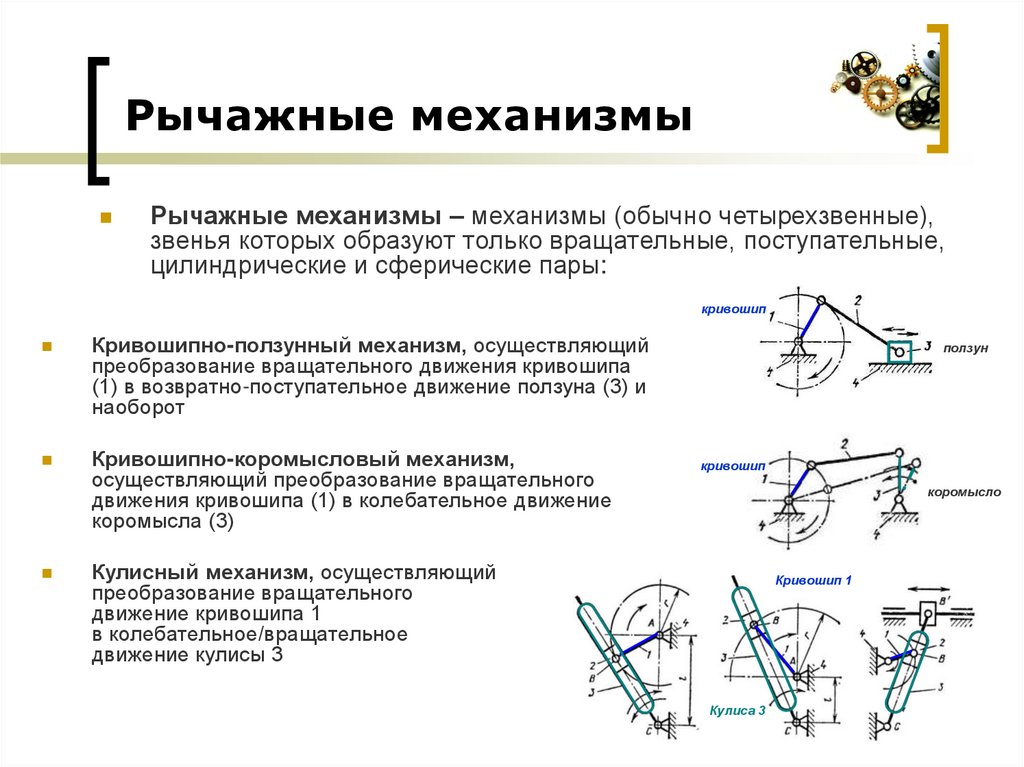
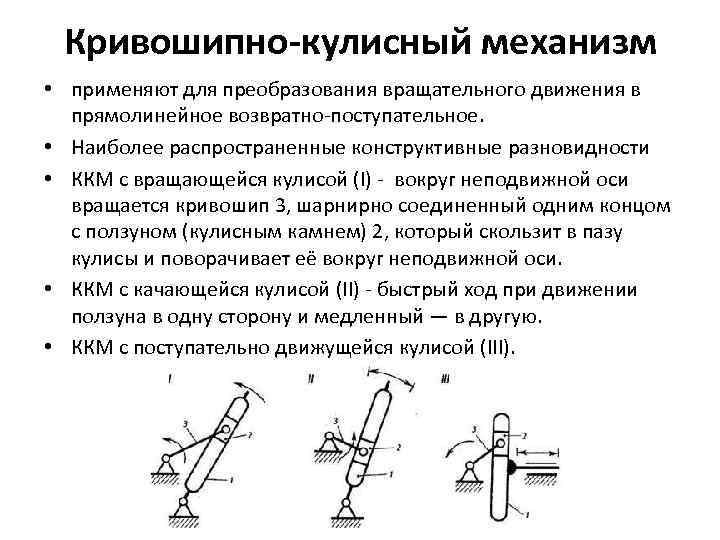
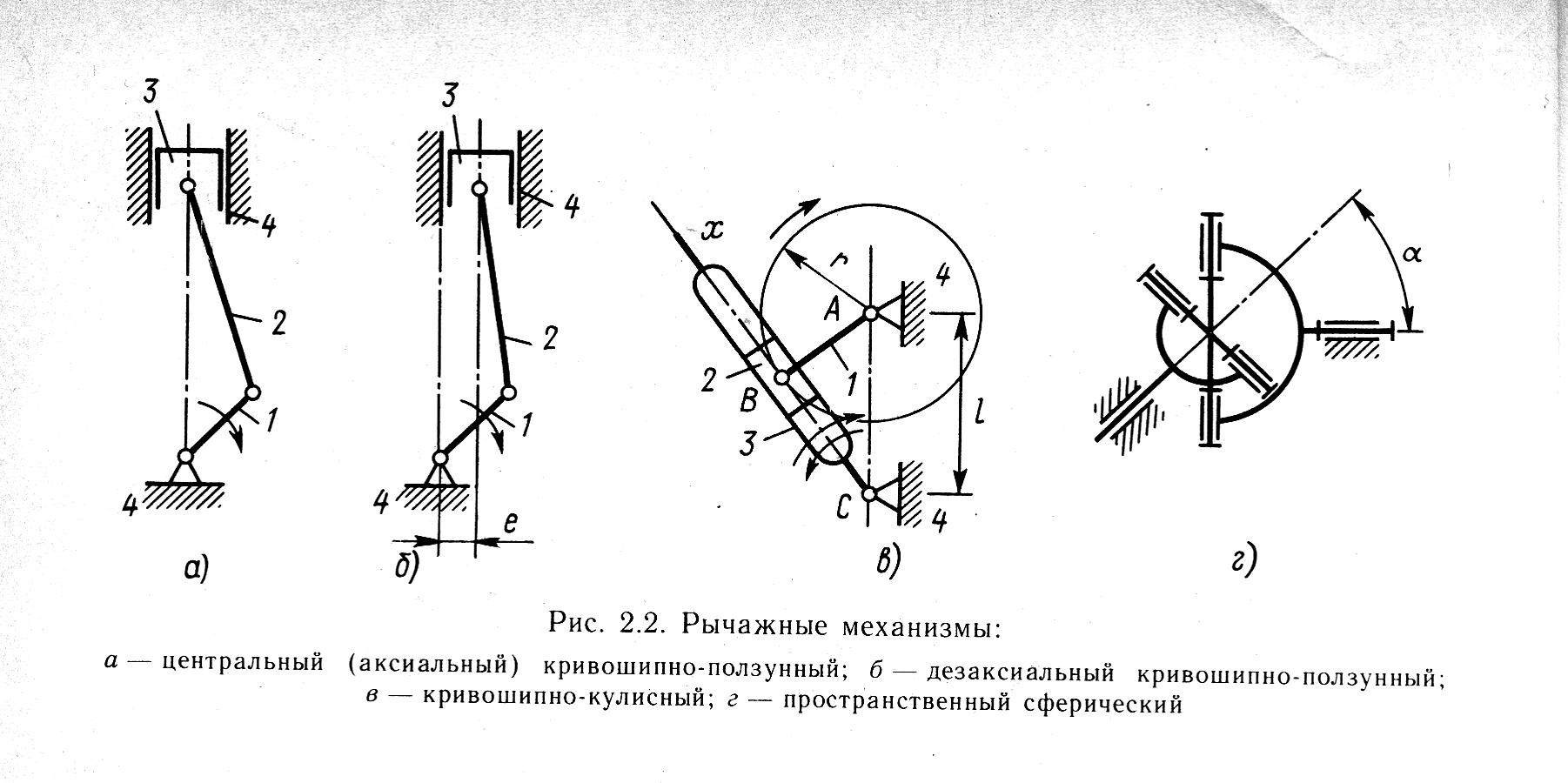
Классификация рычажных механизмов
Все рычажные механизмы классифицируются по достаточно большому количеству различных признаков. При этом общими свойствами можно назвать высокий показатель КПД и повышенную нагрузочную способность, простоту функционирования. Простейшие рычажные механизмы встречаются в самых различных областях промышленности. Основная классификация проводится по принципу действия:
- Четырехзвенники.
- Кривошипно-шатунный.
- Кулисные механизмы.
Приведенные примеры могут устанавливаться для достижения самых различных целей.
Большое распространение получил коленно-рычажный механизм по причине простоты конструкции и длительного эксплуатационного срока.
Как рассчитать простой рычажный механизм самостоятельно?
Перед непосредственным созданием механизма следует провести расчеты основных показателей, а также построить схему распределения нагрузок. Силовой расчет рычажного механизма проводится после определения исходных данных:
- Создается кинематическая схема массы и моментов, инерции звеньев и положения центров массы.
- Учитывается закон движения механизма.
- Определяется внешнее силовое нагружение.
- Рассчитывается угол перекрытия рычажном механизме.
Проводимый кинематический и силовой предусматривает создание системы координат, которая используется для расчета кинематических характеристик. Кулисно-рычажный вариант исполнения проектируется при создании системы координат и обозначением всех сил. Для проектирования требуется большое количество различных формул, при этом в конце следует выполнить проверку.
Как правило, рассматриваемая работа выполняется инженерами, который учитывают ГОСТ проектирование. Это связано с тем, что структурная формула плоских рычагов выбирается в зависимости от области их применения.
Винт.
Резьба винта (рис. 7) – это, в сущности, наклонная плоскость, многократно обернутая вокруг цилиндра. В зависимости от направления подъема наклонной плоскости винтовая резьба может быть левой (A
) или правой (B ). Сопрягающаяся деталь, естественно, должна иметь резьбу такого же направления. Примеры простых устройств с винтовой резьбой – домкрат, болт с гайкой, микрометр, тиски.
Поскольку резьба – наклонная плоскость, она всегда дает выигрыш в силе. Идеальный выигрыш равен отношению расстояния, проходимого точкой приложения усилия за один оборот винта (длины окружности), к расстоянию, проходимому при этом нагрузкой по оси винта. За один оборот нагрузка перемещается на расстояние между двумя соседними витками резьбы (a
иb илиb иc на рис. 7), которое называется шагом резьбы. Шаг резьбы обычно значительно меньше ее диаметра, так как иначе слишком велико трение.
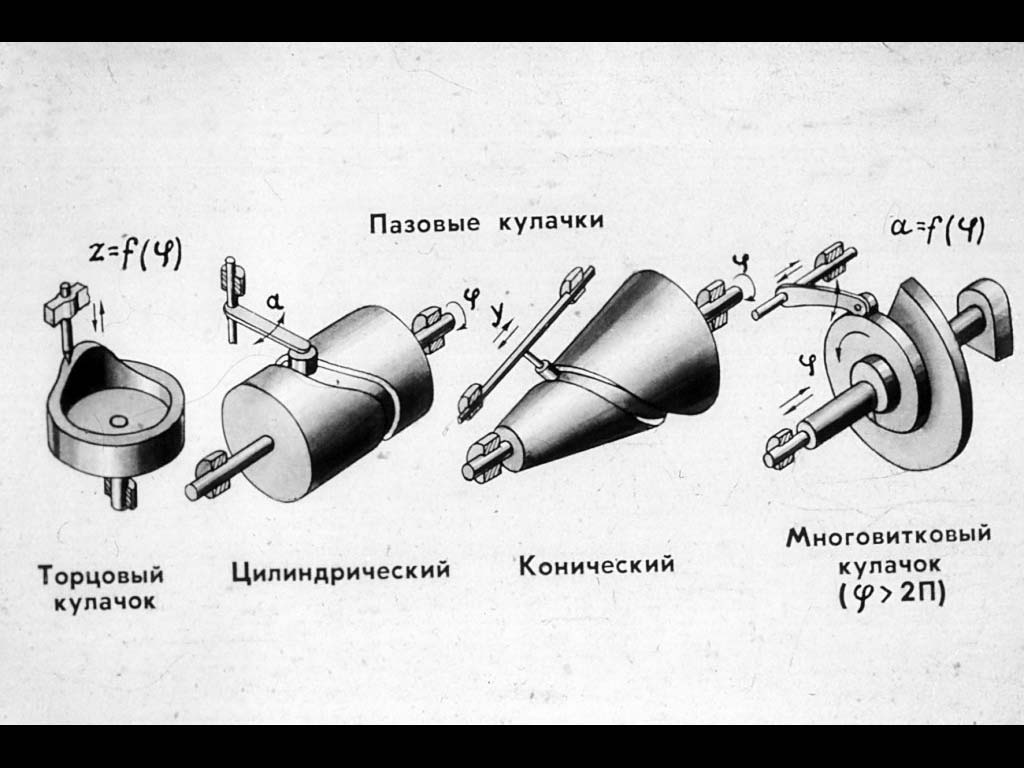
Назначение и область применения
Кулачковый механизм превращает вращение в линейное перемещение малой амплитуды. На практике это короткое линейное движение используется для выполнения следующих операций:
- сцепление или расцепление частей механизма;
- открытие или закрытие клапана;
- возвратно- поступательно движение какого-либо исполнительного органа изделия;
- повторение исполнительным органом наперед заданной в конфигурации поверхности кулачка сложной пространственной траектории.
Эти операции находят применение в следующих устройствах и системах:
- управление клапанами двигателей внутреннего сгорания;
- топливные и масляные насосы;
- приводы гидравлических и пневматических тормозных систем;
- распределитель зажигания в устаревшем карбюраторном двигателе;
- привод перемены передач в трансмиссиях мотоциклов и другого двухтактного транспорта;
- швейные машины;
- музыкальные механизмы: механический орган, шарманка, шкатулка и т. п.;
- транспортно- технологические машины;
- таймеры с механическим приводом;
- сельскохозяйственные механизмы, комбайны, осуществляющие уборку и сортировку корнеплодов или злаков;
Кроме того, широчайшая область использования кулачковых пар лежит там, где требуется не погасить, а, наоборот, создать вибрацию. Они находят применение в вибромашинах, служащих для уплотнения грунта или бетонных полов в строительстве. Горная техника, используемая при добыче рудных материалов, также производит сортировку тонких фракций на вибростолах, приводимых в движение кулачковыми парами.
Еще одна важная сфера применения – точные измерительные приборы и средства механической и электромеханической автоматизации. Контактный манометр и многие другие прецизионные приборы широко используют кулачковые пары для передачи вращения стрелки на шток, замыкающий контактные группы.
Используются кулачковые устройства в малых и средних металлообрабатывающих станках для переключения передач, периодического перемещения рабочих органов.
В производственных технологических установках в химической, пищевой и фармацевтической промышленности устройства используются для дозированной подачи сыпучего сырья к месту дальнейшей переработки.
Несмотря на стремительное совершенствование электронных средств управления, старая проверенная кулачковая пара уверенно удерживает свои позиции там, где требуется многократно повторять однообразные движения с высокой точностью.
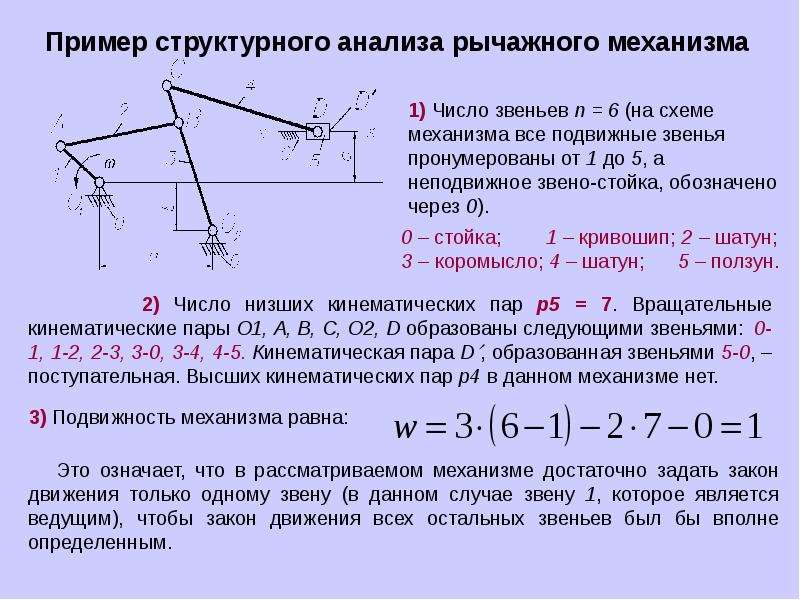
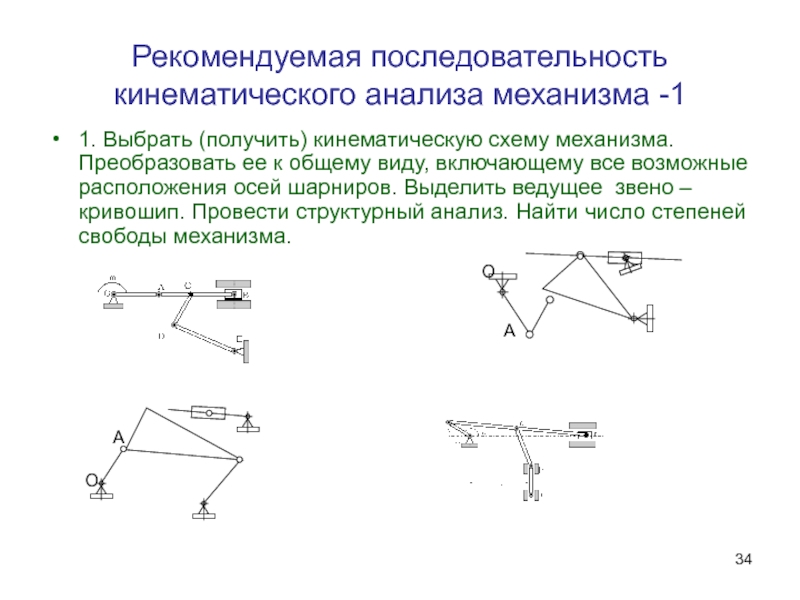
Структурный анализ рычажных механизмов
Проводя исследование рычажного механизма следует уделять внимание возможности выбора двух основных направлений, одно из которых связано с непосредственным анализом, другой синтезом. Оба понятия существенно отличаются друг от друга, что нужно учитывать. Структурный анализ – процесс определения структурных особенностей, который может заключаться в следующем:
Структурный анализ – процесс определения структурных особенностей, который может заключаться в следующем:
- Определении кинематической пары.
- Изучение структур групп.
- Определение особенностей связи кинематической цепи.
Сегодня анализ проводится для определения дефектов структуры, которые в дальнейшем при необходимости могут устраняться.
Каждый случай исследования по-своему уникален
В рассматриваемом случае уделим внимание плоскому рычажному механизму, характеризующийся нерациональной структурой. Его особенности заключаются в нижеприведенных моментах:
- Работоспособность механизма сохраняется исключительно при определенном соотношении длины звеньев. Образующаяся фигура в ходе построения напоминает параллелограмм.
- Для исключения вероятности эксплуатации устройства с дефектами следует точно знать о наличии или отсутствии избыточных взаимосвязях, возможности пассивного распространения и их количества. Стоит учитывать, что они могут возникать исключительно в кинематических цепях замкнутого контура.
- На сегодняшний день выделяют два основных типа контуров: замкнутые и зависимые. Независимым считается вариант исполнения, у которого хотя бы один элемент контура отличается от других.
Зависимые варианты исполнения дублируют друг друга. Для определения числа контура применяется специальная формула.
Также для исключения вероятности появления дефекта проводится расчет количества структурных групп и некоторые другие моменты. В общем можно сказать, что проводимый анализ направлен на достижение следующих задач:
- Построение различных механизмов. При этом проводится определение подвижности и маневренности, так как подобные параметры считаются основными.
- Создание плоских механизмов. Процедура подразумевает анализ состава структуры, а также определяет подвижности.
В целом можно сказать, что преследуемые цели зачастую направлены на определение возможной деформации структуры. Провести полноценный анализ можно только при всестороннем рассмотрении механизма.
Литература
- Артоболевский И. И. (общ.ред.) Машина, её прошлое настоящее и будущее. Круг чтения по технике для молодежи, Молодая гвардия, 1959, 510 с.
- Артоболевский И. И. Теория машин и механизмов. М. Наука 1988
- Reuleaux, «Der Konstrukteur»; его же, «Theoretische Kinematik»; Burmester, «Lehrbuch der Kinematik»; Grashof, «Theoretische Maschinenlehre»;
- Евневич, «Курс прикладной механики»;
- Вейсбах, «Практическая механика» (в переводе Усова); Weisbach, «Lehrbuch der lugenieur und Maschinenmechanik, bearbeitet von Herrmann»; Collignon, «Traité de Mécanique»;
- Чебышёв, «О простейшей суставчатой системе» («Записки Императорской академии наук», приложение к LX тому) и многие другие статьи в «Записках Императорской академии наук»;
- Альбицкий, «Конические зубчатые колеса», «Цилиндрические зубчатые колеса», «Винтовое зацепление»;
- Гохман, «Теория зацеплений»;
- Kempe, «How to draw a straight line» («The Nature», т. XVI). Литература шарнирных механизмов указана в статье Лигина «Liste des travaux sur les systèmes articulés» («Bulletin Darboux», 2 сер., т. V II).
Классификация рычажных механизмов
Все рычажные механизмы классифицируются по достаточно большому количеству различных признаков. При этом общими свойствами можно назвать высокий показатель КПД и повышенную нагрузочную способность, простоту функционирования. Простейшие рычажные механизмы встречаются в самых различных областях промышленности. Основная классификация проводится по принципу действия:
- Четырехзвенники.
- Кривошипно-шатунный.
- Кулисные механизмы.
Приведенные примеры могут устанавливаться для достижения самых различных целей.
Большое распространение получил коленно-рычажный механизм по причине простоты конструкции и длительного эксплуатационного срока.
Устройство и рабочий принцип одинарного механизма смыкания
Аналогичный аппарат предоставлен комбинированием нескольких конструктивных компонентов, благодаря им обеспечивается передача и увеличение усилия. Важными деталями можно назвать:
- Две недвижымые траверсы. Их соединение проходит с помощью цилиндрической колонны.
- Крепление проходит с помощью гаек и добавочных гаек, которые намного увеличивают прочность системы.
- Передача усилия выполняется за счёт гидравлического цилиндра. Его крепление проходит с помощью шарниров.
- Также есть серьги.
Рабочий принцип механизма довольно не простой. Отличается он так:
- Смещение поршня вниз в гидравлическом блоке происходит выпрямление серьги, она соединяется с горизонтальной осью.
- В результате сочетания осей происходит соединение шарниров.
- Шарниры устанавливаются таким образом, чтобы при контакте расстояние между ними было меньше, чем общаяя длина двух серег.
- Выпрямление серег происходит благодаря распорного усилия.
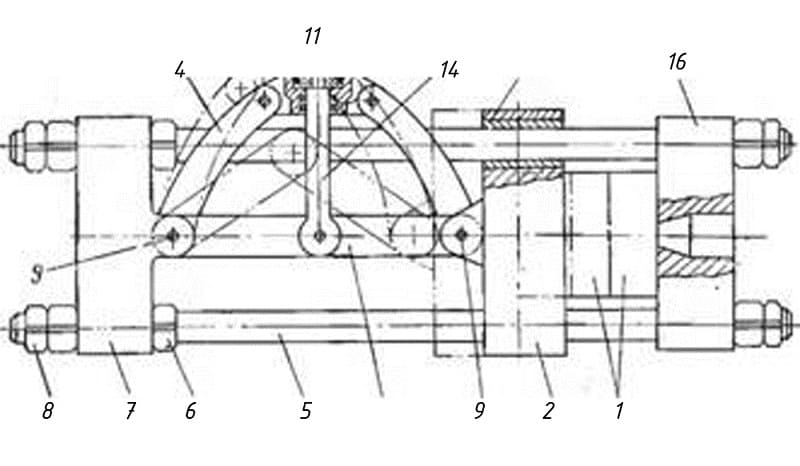
Вышеприведенная информация определяет то, что основным минусом конструкции становятся нескомпенсированные боковые усилия, которая появляются из-за нагрузки втулок и колонн. Собственно поэтому лучше всего применять такой способ выполнения лишь в случае передачи маленького усилия.
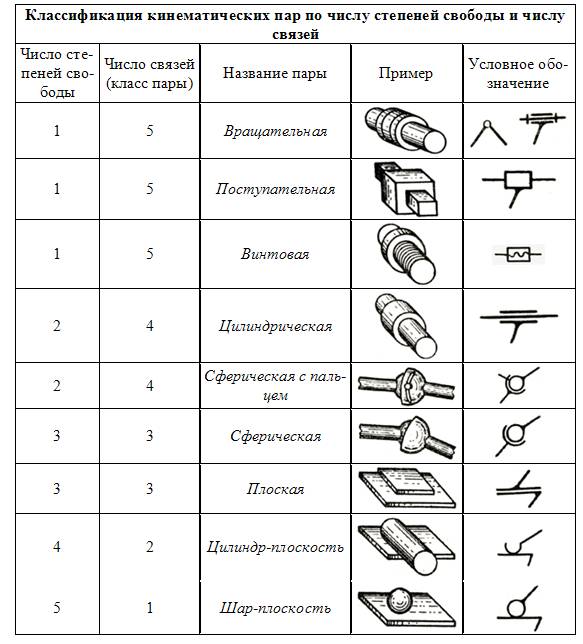
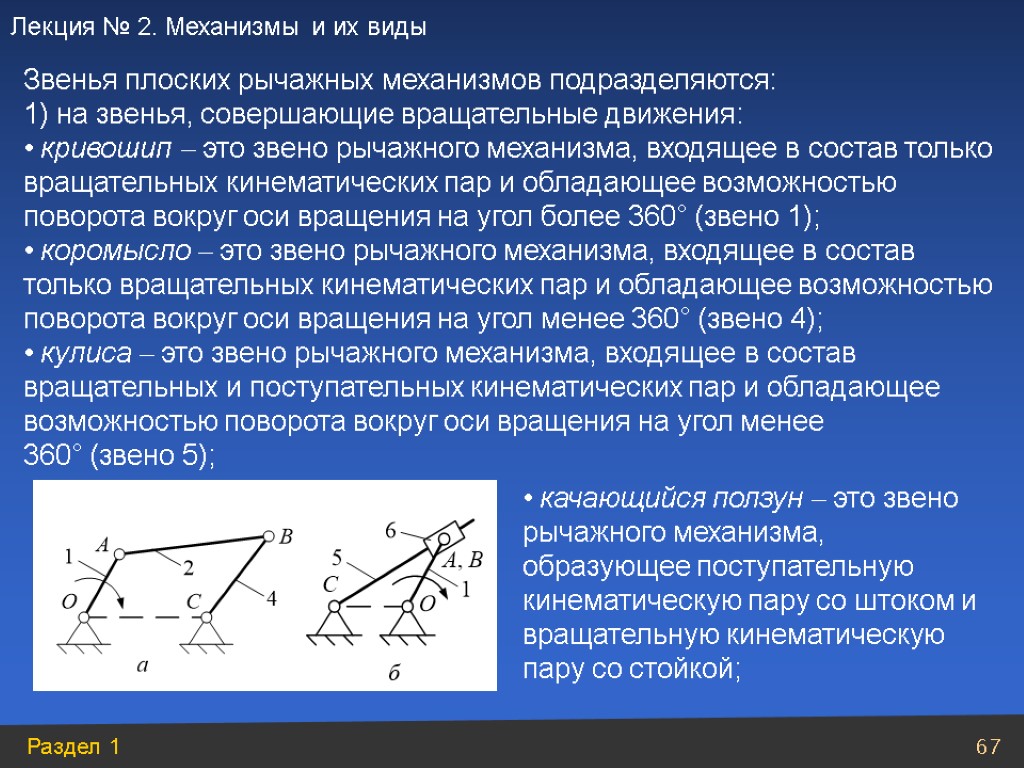
Элементы механизмов
Такая совокупность двух тел, в которой формой одного тела определяется весь ряд последовательных положений, которые способно в нём занять другое тело, называется кинематической парой. Тела, составляющие пару, называются её звеньями. Например, тело, имеющее призматический канал, и помещённая в этот канал призма составляют поступательную пару, потому что одно из этих тел может совершать относительно другого только поступательное движение. Цилиндрическая втулка и размещённый в ней шип (снабжённый закраинами, не дающими ему выскочить из втулки) составляют вращательную пару. Винт и гайка составляют винтовую пару; расстояние между нарезками винта, считаемое по направлению оси винта, называют его шагом (обойдя винт один раз, нарезка приближается к концу винта на один шаг). Заметим, что поступательную пару можно формально трактовать как винтовую, шаг которой равен бесконечности, а вращательную пару — как винтовую с шагом, равным нулю.
Перечисленные кинематические пары называются простыми; отличительное свойство их — в том, что относительное движение одного их звена по отношению к другому тождественно с относительным движением второго звена по отношению к первому.
Кинематические пары, не обладающие этим свойством, называются высшими. Таковы: зацепляющиеся между собой зубчатые колёса, шкив и перекинутый через него ремень, дуговой двухсторонник и полая трёхгранная призма и многие другие. Применительно к высшим кинематическим парам используют такую терминологию: движение звена A относительно звена B называется обращённым по отношению к движению звена B относительно звена A.
Одну из наиболее интересных высших пар представляет собой эллиптический циркуль. Он состоит из доски, в которой сделаны два крестообразно пересекающихся между собой прямолинейных, перпендикулярных друг к другу прореза, и из стержня с выступающими на концах цилиндрическими шипами, диаметры которых равны ширине прорезов. Стержень вставляется шипами в прорезы так, чтобы один шип ходил по одному, а другой по другому из прорезов; с противоположной стороны на шипы навинчиваются винты с головками, препятствующими шипам выскочить из прорезов. При неподвижности доски траектории всех точек стержня суть эллипсы (частные случаи: траектории центров шипов — прямые линии, траектория середин стержня — окружность). Движение стержня относительно доски происходит так, как будто бы соединённый с ним круг, построенный на нём как на диаметре, катился по внутренней стороне окружности, описанной из точки пересечения средних линий прорезов радиусом, равным диаметру катящегося круга. При этом в обращённом движении (т. е. при неподвижности стержня) все точки доски описывают улитки Паскаля.
Звено B, соединённое в какую-либо пару со звеном A, может быть соединено в пару же со звеном C, которое, в свою очередь, может составлять пару со звеном D и так далее. Такое последовательное соединение звеньев в пары называется кинематической цепью. Если последнее звено кинематической цепи соединено в пару с первым, то цепь называется замкнутой, в противном случае она называется открытой.
Кинематическая замкнутая цепь, получающая при неподвижности одного из звеньев вполне определённое движение, характеризующее механизм, называется принудительной. Когда в принудительной цепи одно из звеньев предполагается неподвижным, то говорят, что цепь поставлена на этом звене. Ставя принудительную цепь последовательно на разные её звенья, получим столько механизмов, сколько имеется звеньев в цепи. Примером принудительной цепи может служить шарнирный четырёхзвенник, состоящий из четырёх стержней, соединённых между собой вращательными парами, называемыми шарнирами.
2.1 Определение скоростей
Для заданной
схемы механизма строим 12 положений.
Определяем
масштабный коэффициент построения механизма:
(2.1)
где, – масштабный коэффициент,
– длина звена,
– длина звена на чертеже,
Запишем
длинны звеньев механизма на чертеже
Приступаем к
построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример
построения для положения №5:
У кривошипа
определяем скорость точки А
(2.2)
где, – длина звена,
– угловая скорость кривошипа,
Для
построения вектора скорости точки А определяем масштабный коэффициент
(2.3)
где, – скорость точки А,
– вектор скорости точки А,
– полюс, выбираемый произвольно
Для
определения скорости точки B запишем систему уравнений:
(2.4)
– из задания
Для
определения скорости центра масс 2-го звена S2 воспользуемся
соотношением:
(2.5)
где, , –
расстояния между соответствующими точками на механизме, м
, –
длинны векторов скоростей на плане, мм
мм
Соединив,
точку и π получим скорость центра масс
второго звена.
Для
определения скорости точки C запишем систему уравнениё:
(2.6)
– из задания
Для
определения скорости центра масс 4-го звена S4 воспользуемся
соотношением:
(2.7)
где, , –
расстояния между соответствующими точками на механизме, м
, –
длинны векторов скоростей на плане, мм
мм
Соединив,
точку и π получим скорость центра масс
второго звена.
Определим
значения угловых скоростей звеньев.
Направление определяем, перенеся вектор ab в точку S2 – второе звено вращается
против часовой стрелки. Аналогично получим, что направлена
по часовой стрелке.



Скорости
точек остальных положений определяются аналогичным образом. Все значения сводим
в таблицу(2.1).
Область применения
Рычажные механизмы получили весьма широкое применение, что прежде всего можно связать с их преимуществами перед другими устройствами, которые устанавливаются для транспортировки грузов и иной передачи усилия
Рассматривая область применения следует уделить внимание следующим моментам:
- Чаще всего рычаг устанавливается для подъема груза. Он является неотъемлемым элементом достаточно большого количества различных устройств, которые приводятся в движение ручной силой.
- Встречаются в производственных цехах, в химической промышленности, в машиностроении и многих других отраслях.
- Область применения ограничивается типом применяемого материала при изготовлении основных частей, принципом действия, а также максимальной возможной нагрузкой, которая оказывается на рабочий орган.
Сегодня рычажные механизмы получили весьма широкое распространение, могут применяться при создании различного оборудования. При этом если важна экономия, то рычаг можно создать своими руками.

В заключение отметим, что провести самостоятельно проектирование рычага достаточно сложно. Это связано с необходимостью применения достаточно большого количества различных формул, построением графиков соответствия и многими другими моментами. Допущенная ошибка может стать причиной повреждения механизма на момент эксплуатации, существенного снижения показателя КПД и возникновения многих других проблем.
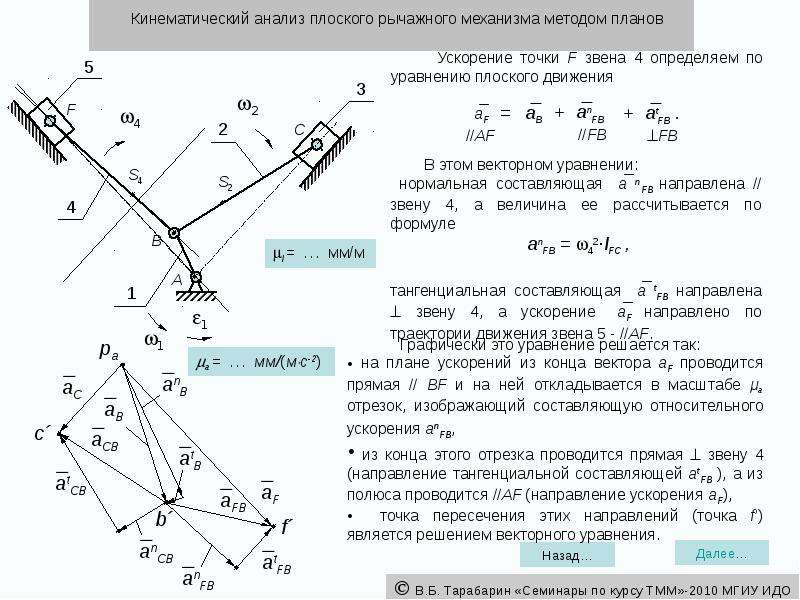
3.2 Определение ускорений
Определяем
угловое ускорение звена 1.
, (3.1)
где, – момент от сил движущих,
– момент от сил сопротивления,
– приведённый момент инерции маховика,
– приведённый момент инерции рычажного
механизма для расчётного положения,
– первая производная от приведённого
момента инерции механизма для расчётного положения
, (3.2)
где, – масштабный коэффициент по оси ,
– масштабный коэффициент по оси φ,
– угол между касательной, проведённой к
кривой графика в расчётном положении и осью φ.

Знак минуса
говорит о том, что кривошип ОА замедляется. Направляем против
направления и берём значение ускорения по модулю.
Строим план
ускорений для расчётного положения.
Скорость
точки А определяем по формуле
, (3.3)
где, – ускорение точки А,
– нормальное ускорение точки А
относительно точки О,
– тангенциальное (касательное)
ускорение точки А,
Ускорение найдём по формуле:
, (3.4)
где, – угловая скорость кривошипа,
– длина звена ОА, м
Ускорение найдём по формуле:
, (3.5)
Из
произвольно выбранного полюса откладываем вектор длиной 100 мм. Найдём масштабный
коэффициент плана скоростей.
, (3.6)
Определим
длину вектора :
Ускорение
точки А определим из следующеё формулы:

Определим
ускорение точки B из следующей системы уравнений:
, (3.7)
Для
определения нормальных ускорений точки В относительно точек А и С
Воспользуемся
следующими формулами:
Определим
длину векторов :
Ускорение направляющей
равно нулю, т.к. она неподвижна.
Кореолисово
ускорение точки В относительно направляющейрано
нулю, т.к. точка В движется только поступательно относительно .
Ускорение
точки В найдём, решив системе (3.7) векторным способом:
Из вершины
вектора ускорения точки А () откладываем вектор (параллелен звену АВ и направлен от В к
А), из вершины вектора
проводим
прямую перпендикулярную звену АВ (линия действия ); из
полюса проводим горизонтальную прямую (линия
действия ); на пересечении линий действия
векторов и получим
точку b,
соединив полученную точку с полюсом, получим вектор ускорения точки В.
Из плана
ускорений определяем вектор ускорения точки В и вектор тангенциального
ускорения :
Ускорение
сочки С определяем аналогично ускорению точки B.
Определим
длину векторов :
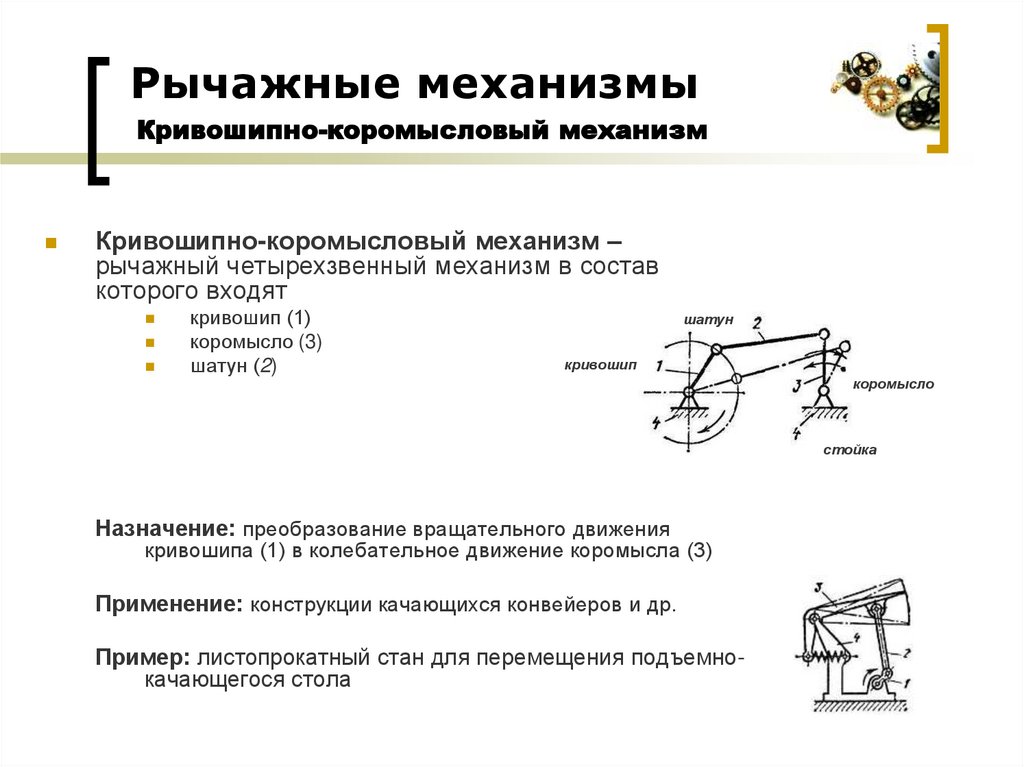
Шарнирно-рычажные механизмы
Подобный тип механизма также получил весьма широкое распространение. При этом за его длительный срок эксплуатации было изобретено несколько вариантов исполнения, которые характеризуются своими определенными свойствами. Выделяют следующие виды шарнирно рычажных механизмов:
- С двумя кривошипами.
- Кривошипно-коромысловые.
- Двух коромысловые.
Примером использования варианта исполнения с двумя кривошипами можно назвать перенос тяжелой заготовки с тележки на обрабатывающий станок. Его конструкция характеризуется следующими особенностями:
- В качестве основы применяется две четырехлучевые звездочки, которые фиксируются на валу.
- Также фиксация осуществляется за счет шарнирного соединения с осью и четырьма ложементами. На момент воздействия усилия они создают двухкривошпный механизм, который принимает часть нагрузки.
- Валы фиксируются на подшипниках скольжения, которые расположены в корпусе. При помощи кронштейна они устанавливаются на общей раме, принимающую основную нагрузку.
Именно конструктивные особенности во многом определяют то, где и каким образом может применяться устройство.
Устройство и принцип действия одинарного механизма смыкания
Подобный агрегат представлен сочетанием нескольких конструктивных элементов, за счет которых обеспечивается передача и увеличение усилия. Основными деталями можно назвать:
- Две неподвижные траверсы. Их соединение проводится при помощи цилиндрической колонны.
- Крепление проводится при помощи гаек и контргаек, которые существенно повышают прочность конструкции.
- Передача усилия осуществляется за счет гидравлического цилиндра. Его крепление проводится при помощи шарниров.
- Также есть серьги.
Принцип действия механизма достаточно сложный. Характеризуется он следующим образом:
- Смещение поршня вниз в гидравлическом блоке происходит выпрямление серьги, она совмещается с горизонтальной осью.
- В результате совмещения осей происходит соединение шарниров.
- Шарниры монтируются так, чтобы при контакте расстояние между ними было меньше, чем суммарная длина обеих серег.
- Выпрямление серег происходит за счет распорного усилия.
Приведенная выше информация определяет то, что главным недостатком конструкции становятся нескомпенсированные боковые усилия, которая возникают из-за нагрузки втулок и колонн. Именно поэтому рекомендуется использовать подобный вариант исполнения только в случае передачи небольшого усилия.
Что происходит после нажатия рычага/кнопки?
Изначально активируется шток, производящий подъем пробковой груши – запорного клапана сливного узла, в результате чего вода из накопительной емкости свободно проникает в унитаз, омывая его рабочую поверхность, после чего попадает в канализацию. Потом пробка под воздействием собственной массы становится на место. перекрывая ток воды в унитаз.

Одновременно с падением уровня воды в резервуаре открывается запорный клапан впускного механизма и осуществляется наполнение бачка рабочей жидкостью. Этот процесс прекращается по достижении поплавком верхнего положения, которое обычно устанавливается на 20-30 миллиметров ниже боковых отверстий резервуара.
Основной закон.
Хотя механизмы и позволяют получить выигрыш в силе или скорости, возможности такого выигрыша ограничиваются законом сохранения энергии. В применении к машинам и механизмам он гласит: энергия не может ни возникать, ни исчезать, она может быть лишь преобразована в другие виды энергии или в работу. Поэтому на выходе машины или механизма не может оказаться больше энергии, чем на входе. К тому же в реальных машинах часть энергии теряется из-за трения. Поскольку работа может быть превращена в энергию и наоборот, закон сохранения энергии для машин и механизмов можно записать в виде
Работа на входе = Работа на выходе + Потери на трение.
Отсюда видно, в частности, почему невозможна машина типа вечного двигателя: из-за неизбежных потерь энергии на трение она рано или поздно остановится.